


|
Solar life |
|
Designed by Brian Fields. |

|
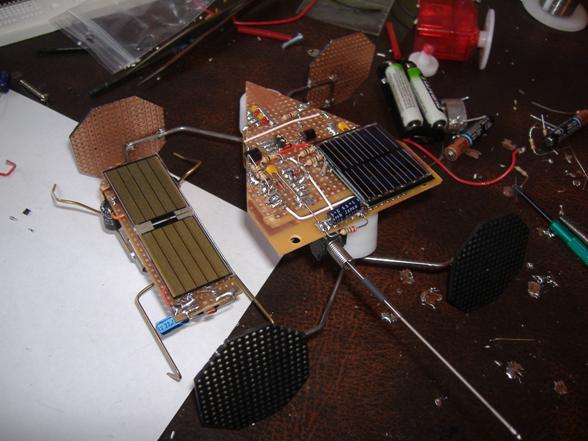
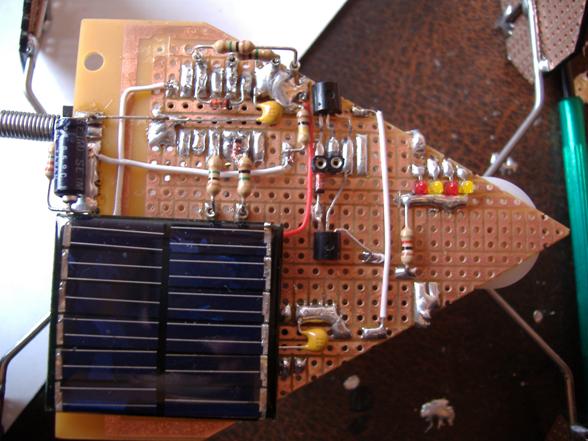
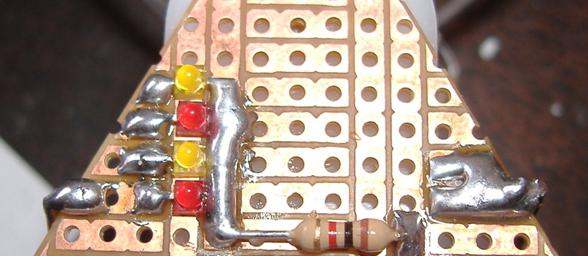
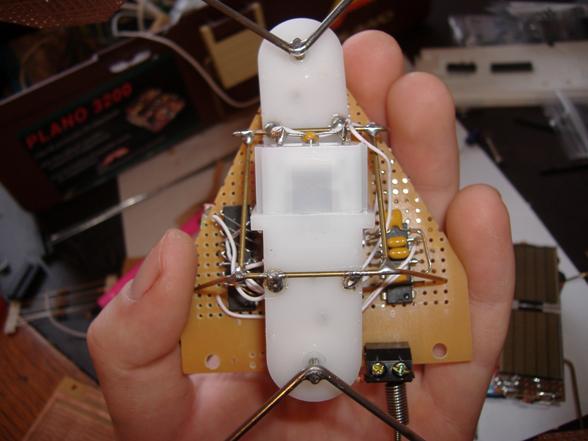
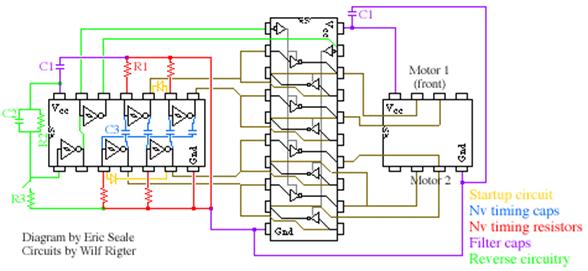
This is SW 2. By far the largest solar walker that I have( a little too big!). This is basically the same circuit as SW 1.2 but just that the inverters of the 74**14 are use to reverse. Still a simple circuit. I find that you want to stay simple when making solar-walkers. Pins are down. I used a 74AC240 for the motor driver and 74AC14 for the microcore. Startup circuit is simple two small diodes 1N914. Nv timing caps are .22uf(nothing new here, though you can use other values, I recommend .22uf). Nv timing resistors are variable, I used 1 meg for sort step. The higher the resistor the longer the steps. Filter caps are .1uf, and reversing circuitry is whatever you want R3 is 100k and R2 is 2.2Meg and C2 is 4.7 uf. Larger values means longer reversing time. Also the yellow and red leds are to show which nv is firing. The part used to build this is a customized pcb. 2 X GM7 motors. Brass wire (frame). The legs are made from hanger wire with octagonal pcb legs. This robot is somewhat based on Mark Tildens solar robots that had these same feet. Eventually this robot will have a solar cell on each foot to make a total on five solar cells. This robot is not totally done but I thought I would get it on here anyway. The only flaw with this robot is that it was mostly created at wee hours of the night so the soldering is bad in places but other then that it has a nice look to it! More to come later! Question? Send them to Veritas21885@hotmail.com |
